| Семинары | Обучение | Лицензирование | Разработка | Подписка | Форум | Регистрация |
|

|
|
|||||||||||||||||||||||||||||||||
|
|
||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||
|
|
|||||||||||||||||||||||||||||||||
| Вход | |||||||||||||||||||||||||||||||||
|
Раздел "Femlab"
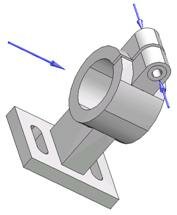
Femlab 2.3. Руководство пользователя (перевод с английского с редакторской правкой В.Е.Шмелева): В оглавление книги \ К следующему разделу \ К предыдущему разделу 1.5.3. Деформация держателя (фиксатора) с зажимом Этот пример относится к области структурной механики. Здесь анализируется деформация фиксатора направляющей системы под действием механического напряжения. Фиксатор удерживает направляющую систему высокочастотного электромагнитного поля. Фиксатор должен гарантировать минимальное отклонение направляющей системы от заданного положения. На держатель действует вес направляющей системы и сила стяжного винта. Эти силы обуславливают его напряжённое состояние и деформацию. В данной модели фиксатор направляющей системы приложен к абсолютно жёсткой стенке, причём для крепления использовано только одно из двух установочных отверстий (для упрощения анализа). В данном примере моделирование распределения деформации даёт ответ на два важных вопроса:
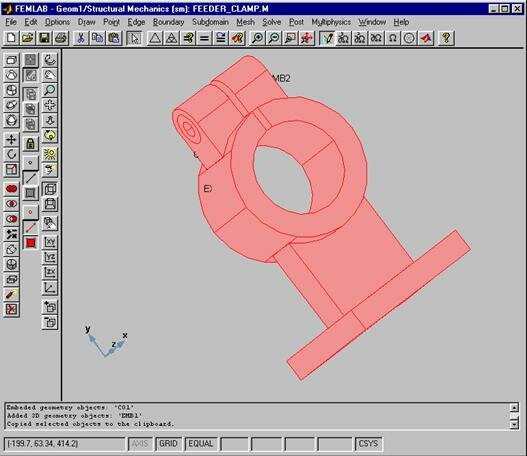
Фиксатор направляющей системы изображён на рис. 1.5.3.1. Стрелками показаны силы, вызывающие механические напряжения.
Данные о нагрузке держателя Предположим, монтажник закрепляет направляющую систему, используя стандартный винт с метрической резьбой М3 класса 8.8. Первая цифра означает, что временное сопротивление винта на разрыв составляет 800 Н/мм2, вторая цифра указывает, что предел текучести материала винта составляет 80% от временного сопротивления. Такой винт может обеспечить максимальное усилие 4500 Н. Моделирование показывает, что 80% этой силы достаточно для закрепления. Шайба с наружным диаметром 7 мм равномерно распределяет нагрузку от стяжного винта на обе стороны зажима. Максимальный вес направляющей системы 1000 Н, эта нагрузка равномерно распределена по всей внутренней цилиндрической поверхности фиксатора. Конструкция фиксатора симметрична. Распределение нагрузки тоже симметрично. Поэтому для построения законченной модели деформации достаточно в расчётную область включить только половину конструкции. В данном примере для наглядности при построении геометрии расчётной области прорисуем всю конструкцию. Моделирование в GUI-приложении femlab Навигатор моделей
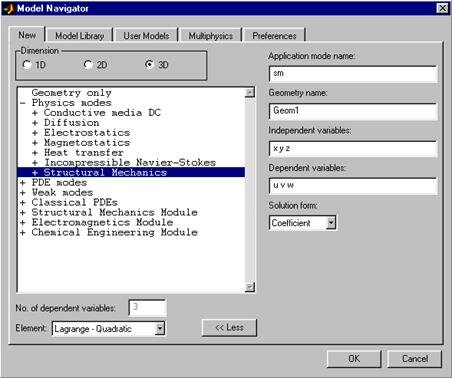
Закладка New Навигатора моделей раскрывается в результате запуска GUI-приложения femlab или в результате выполнения команды меню File/ New. В закладке New Навигатора моделей выбираем прикладной режим Physics Modes/ Structural Mechanics (рис. 1.5.3.2). На этом рисунке окно показано после нажатия кнопки More. Следует обратить внимание на строку редактирования Dependent variables: u, v, w - соответственно x, y, z составляющие вектора перемещения. Окно Навигатора моделей закрываем нажатием клавиши OK. Параметры и настройки
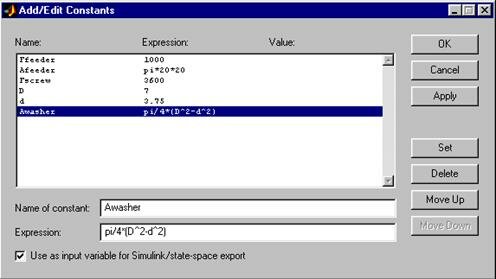
Технология определения констант обычная. Вписываем имя константы в строку редактирования Name of constant. Вписываем определяющее выражение в строку редактирования Expression. Нажимаем кнопку Set. Определяем следующую константу. После определения всех констант нажимаем кнопку Apply, в результате чего произойдёт вычисление определяющих выражений (в колонке Value появятся значения). Вычисление происходит в порядке следования выражений. В выражениях могут быть имена ранее определённых констант. Нажатием кнопки OK закрываем диалоговое окно. Вид этого окна до вычисления выражений показан на рис. 1.5.3.3.
Режим прорисовки геометрии
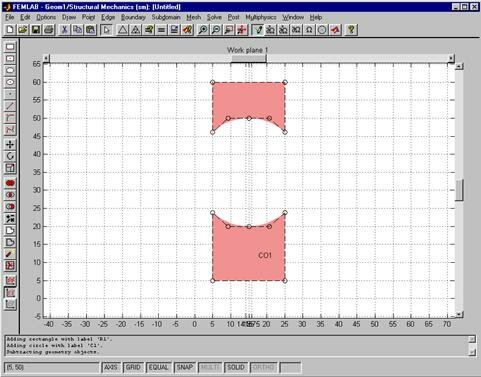
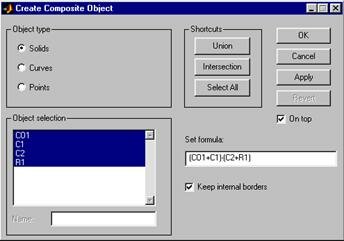
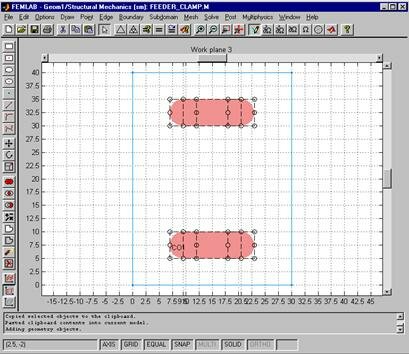
Теперь можно перейти к созданию геометрических объектов в рабочей плоскости № 1. Нажмём кнопку Снова нарисуем круг с центром в точке (15,35) и радиусом 15. Нарисуем круг с центром в точке (15,35) и радиусом 10. Нарисуем прямоугольник с вершинами (14.25,40) и (15.75,60). Клавишей Ctrl-A выделим все объекты. Кнопкой
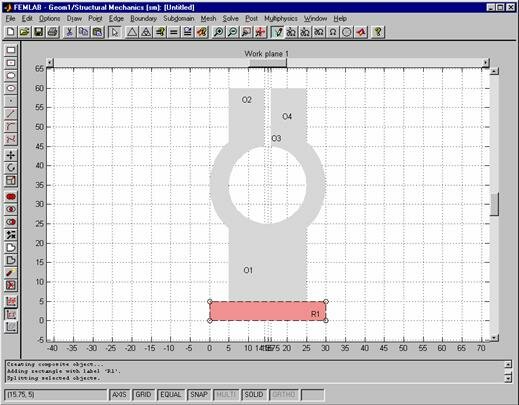
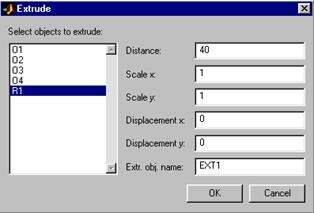
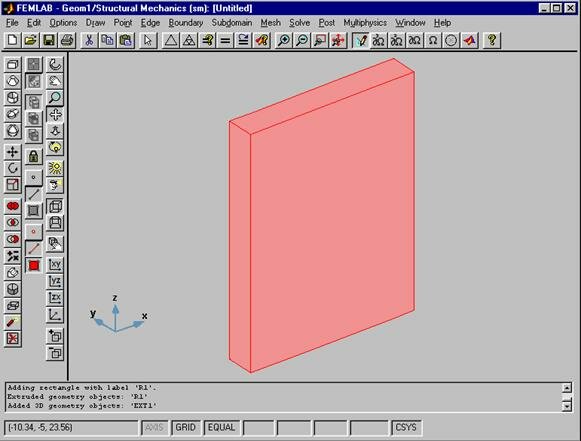
Созданный композиционный объект разобьём на подобласти, нажав кнопку Теперь на основе двумерных объектов в рабочей плоскости № 1 можно строить трёхмерные объекты. Начнём с экструзии выделенного прямоугольника R1. Выполним команду меню Draw/ Extrude. В результате развернётся диалоговое окно Extrude. В строку редактирования Distance впишем число 40 (экструзия на высоту 40 мм, см. рис. 1.5.3.9). Нажатие кнопки OK приведёт к закрытию диалогового окна, построению трёхмерного объекта и показу его на трёхмерной сцене (рис. 1.5.3.10).
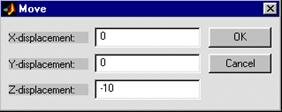
Чтобы опустить полученный параллелепипед на 10 мм, нажмём кнопку
Вернёмся опять в рабочую плоскость № 1. Нажмем кнопку
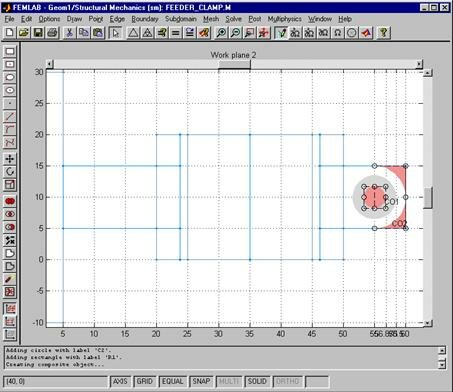
Для прорисовки остальных элементов трёхмерной геометрии нужно создать ещё одну рабочую плоскость. Выполним команду меню Draw/ Add/Edit/Delete Work Plane. Раскроется диалоговое окно Add/Edit/Delete Work Plane (закладка Quick). Нажмём кнопку Add. В ниспадающее меню Change/Rename work planes добавится новая рабочая плоскость, которой автоматически будет присвоено имя Work plane 2. В закладке Quick включим радиокнопку Quick positioning, в группе Plane включим радиокнопку y-z. В строку редактирования x впишем число 5 (рис. 1.5.3.13). Это означает, что мы создаём рабочую плоскость, описываемую уравнением x=5. Нажатие кнопки OK приведёт к закрытию диалогового окна и созданию новой рабочей плоскости. GUI-приложение femlab перейдёт в режим показа рабочей плоскости № 2.
Нажмем кнопку Нарисуем два круга с центром в точке (55,10) с диаметрами 3.5 и 7. Нажимая кнопку
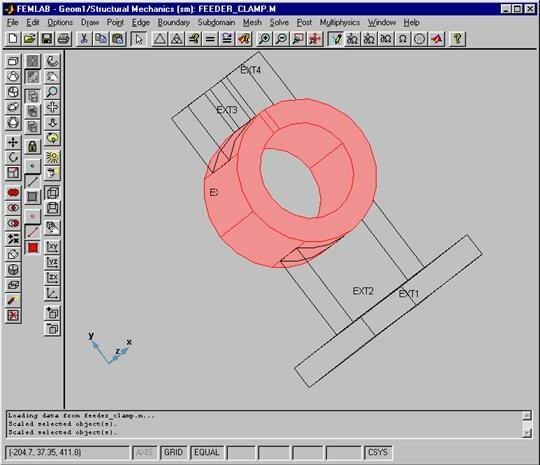
Выполним команду меню Draw/ Extrude. В строку редактирования Distance впишем число 9.25 и нажмём кнопку OK. Нажмём кнопку Кнопкой
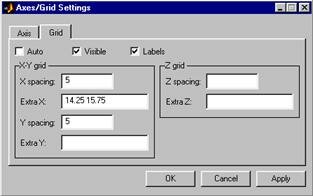
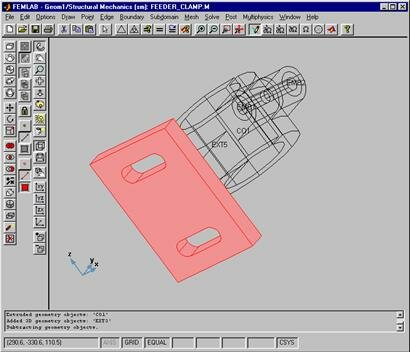
Чтобы прорисовать установочные отверстия, нужно создать рабочую плоскость № 3 (y=0). Выполним команду меню Draw/ Add/Edit/Delete Work Plane. Раскроется диалоговое окно Add/Edit/Delete Work Plane. Нажмём кнопку Add. В закладке Face Parallel включим радиокнопку Face positioning. В списке Select face выберем поверхностный объект EXT1:1. Этот объект принадлежит плоскости y=0. Посмотреть направление местных координатных осей в трёхмерной геометрии можно, нажав кнопку Disp Coord. Нажав OK, перейдём во вновь созданную рабочую плоскость. Выполним команду меню Options/ Axes/Grid Settings. В закладке Grid сбросим флажок Auto, в строки редактирования X spacing, Y spacing впишем число 2.5. В строку редактирования Extra X впишем числа 9.5 и 20.5. Нажмём кнопку OK для закрытия диалогового окна. Нарисуем прямоугольник с вершинами (9.5,5) и (20.5,10). Нарисуем круг с центром (9.5,2.5) радиусом 2.5 и такой же круг с центром (20.5,2.5). Нажмём клавишу Ctrl-A и кнопки
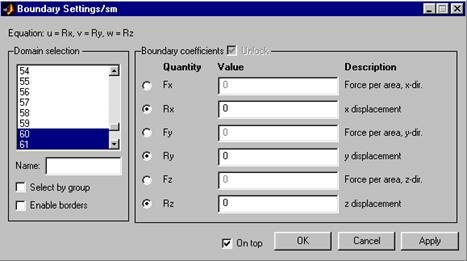
Выполним команду меню Draw/ Extrude, в диалоговом окне Extrude в строку редактирования Distance впишем число -5 и нажмём кнопку OK. Вновь созданный экструзионный объект будет выделен. Закрепим это выделение щелчком мыши с одновременным удерживанием клавиши Ctrl. Щелчком мыши выделим также объект EXT1. Нажав кнопку Режим задания граничных условий Чтобы задать граничные условия, нужно выполнить команду меню Boundary/ Boundary Settings. При выполнении этой команды переход GUI-приложения femlab в режим Boundary Mode происходит автоматически. Данная команда разворачивает диалоговое окно Boundary Settings. Вид этого окна с установленными значениями коэффициентов граничных условий для некоторых граничных сегментов показан на рис. 1.5.3.18.
Коэффициенты граничных условий для всех остальных сегментов сведём в таблицу.
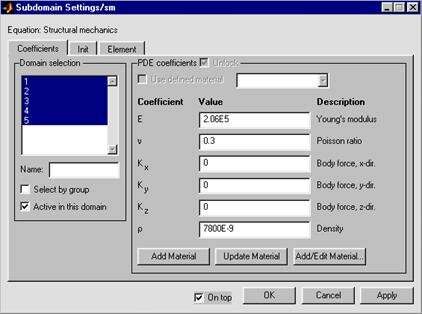
По умолчанию для всех внешних поверхностей расчётной области задаются нулевые граничные условия Неймана: силы механических нагрузок равны нулю. Граница № 25 - кольцевая поверхность, на которую через шайбу действует сила стяжного винта, направленная вдоль оси x. Граница № 68 - кольцевая поверхность, на которую через шайбу действует ответная сила гайки стяжного винта, направленная против оси x. Границы №№ 17, 18, 45, 47 - цилиндрические поверхности зажима, к которым приложена сила тяжести направляющей системы, направленная против оси z. Приведённые в таблице Fx, Fy, Fz - компоненты вектора поверхностной плотности силы нагрузки. Границы №№ 32, 33, 36, 37, 60, 61 - поверхности нижнего установочного отверстия. Здесь нужно задать нулевые граничные условия Дирихле: компоненты вектора перемещения равны нулю (Rx = Ry = Rz = 0, см. рис. 1.5.3.18). Режим задания коэффициентов PDE и материальных свойств Чтобы задать параметры упругих свойств (коэффициенты PDE), нужно выполнить команду меню Subdomain/ Subdomain Settings. При выполнении этой команды переход GUI-приложения femlab в режим Subdomain Mode происходит автоматически. Данная команда разворачивает диалоговое окно Subdomain Settings. Вид этого окна с установленными значениями параметров материальных свойств для всех зон расчётной области, если длина измеряется в миллиметрах, а сила - в ньютонах, показан на рис. 1.5.3.19. Следует обратить внимание, что в этом диалоговом окне по умолчанию заданы параметры упругих свойств стали: E = 2.06*1011 Н/м2 = 2.06*105 Н/мм2 - модуль Юнга, v=0.3 - коэффициент Пуассона, Kx = Ky = Kz = 0 - объёмная плотность силы нагрузки, p=7800 кг/м3=7.8*10-6 кг/мм3. Для задания материальных свойств в данной задаче достаточно в списке Domain selection выделить все зоны расчётной области, в строке редактирования E заменить значение 2.06E11 на 2.06E5 и нажать кнопку OK для закрытия диалогового окна и принятия коэффициентов PDE. Плотность вещества можно игнорировать, т.к. она не влияет на результаты расчётов в статической задаче теории упругости.
Режим генерации конечноэлементной сетки
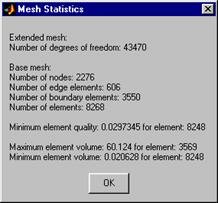
Для перехода в этот режим достаточно нажать кнопку В данной задаче, прежде чем генерировать сетку, нужно настроить параметры сетки. Выполним команду меню Mesh/ Parameters. Развернётся диалоговое окно Mesh Parameters. Вид этого окна с установленными значениями параметров показан на рис. 1.5.3.20. Нажмём кнопку
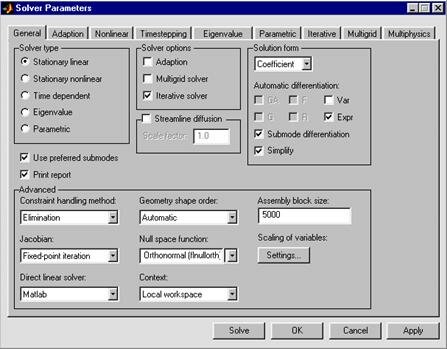
Решение Для экономии памяти целесообразно использовать итерационный решатель. Нажмём кнопку
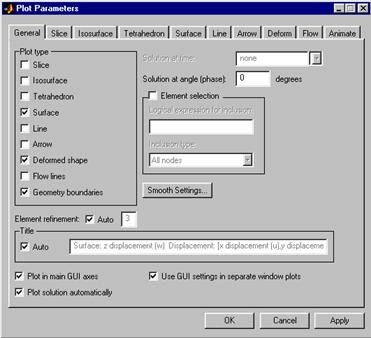
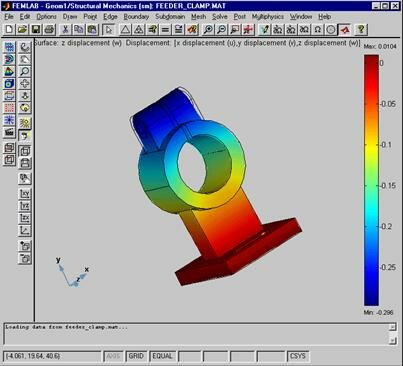
Визуализация решения и постпроцессорная обработка Сразу после завершения решения GUI-приложение femlab переходит в режим визуализации и постпроцессорной обработки. Чтобы в цвете показать z-составляющую вектора перемещения и деформированный вид фиксатора, выполним следующие действия. Выполним команду меню Post/ Plot Parameters. Развернётся закладка General диалогового окна Plot Parameters. В группе Plot type установим флаги Surface и Deformed shape. В закладке Surface в ниспадающем меню Surface expression выберем пункт z displacement (w). В закладке Deform в ниспадающем меню Deformation x expression выберем пункт x displacement (u), в ниспадающем меню Deformation y expression выберем пункт y displacement (v),. в ниспадающем меню Deformation z expression выберем пункт z displacement (w). Закладка General в этом случае будет иметь вид, показанный на рис. 1.5.3.23. Нажатие кнопки OK приведёт к построению картины, показанной на рис. 1.5.3.24.
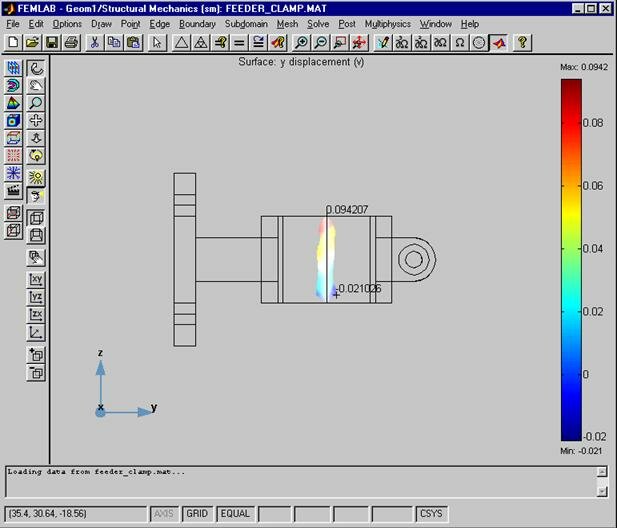
Угол поворота оси цилиндра зажима относительно оси z может быть выражен через разность между максимумом и минимумом перемещения вдоль оси y. Определим эту составляющую перемещения в середине зажима. Опять раскрываем окно Plot Parameters. В закладке General сбросим флажок Deformed shape, в закладке Surface в ниспадающем меню Surface expression выберем пункт y displacement (v) и установим флажок Max/Min marker. Установим флажок Element selection в закладке General. В строку редактирования Logical expression for inclusion впишем x==5 & y==35. В ниспадающем меню Inclusion type выберем пункт Any node и нажмём кнопку OK. На инструментальной панели Orbit/Pan/Zoom нажмём кнопку
Угол поворота оси цилиндра относительно оси z вычислим так:
Расчёт показал, что угол наклона не превышает 1 градуса. Теперь нажмём кнопку
В оглавление книги \ К следующему разделу \ К предыдущему разделу |
|
Всероссийская научная конференция "Проектирование научных и инженерных приложений в среде MATLAB" (май 2002 г.)
|
||
| На первую страницу \ Сотрудничество \ MathWorks \ SoftLine \ Exponenta.ru \ Exponenta Pro | ||
| E-mail: | ||
| Информация на сайте была обновлена 11.05.2004 |
Copyright 2001-2004 SoftLine Co Наши баннеры |
|